1.行业信息、发展历史、市场的分类和构成等。
(1)行业信息
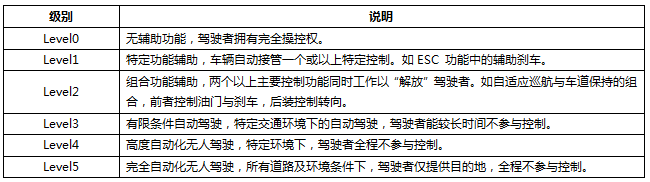
无人驾驶是指通过给车辆装备智能软件和多种感应设备,包括车载传感器、雷达、GPS以及摄像头等,根据感知所获得的道路、车辆位置和障碍物信息,控制车的转向和速度,实现车辆的自主安全驾驶,安全高效到达目的地。通俗来讲,无人驾驶技术将经过三个过程:辅助安全驾驶系统(正在量产)、自动驾驶、无人驾驶。美国高速公路安全管理局(NHTSA)将无人驾驶技术的发展分为五个阶段:
(2)无人驾驶的技术原理
无人驾驶需要四项技术:
● 感知——汽车的眼睛(视觉),耳朵(听觉),身体(触觉):依靠各类传感器获得环境数据,突破人类生理限制。传感器搭载数量的持续提升,使行车数据收集渠道显著拓宽。
● 判断——汽车的大脑(机器智能):根据传感器等输入数据,行车电脑取代司机主动发出控制指令; 依靠芯片与算法的不断提升从而得以实现。
● 执行——汽车的手与脚:电子装置取代传统机械设备,根据行车电脑指令实施控制。
● 互联——汽车的远程智囊:车内网,车际网,三网融合进一步提升整个交通系统的运行效率。
(3)无人驾驶技术的发展历程
● 基于摄像头的巡航驾驶(1966年-1983年)
1966年美国斯坦福大学研究所的SRI人工智能研究中心开始研发一款拥有车轮结构的多功能机器”Shakey”,它可以执行开、关灯这样简单的动作,其内置的传感器和软件系统都开创了自主自动导航功能的先河;1977年,日本筑波工程研究实验室抛弃了人们之前一直使用的脉冲信号控制方式,开发出第一个基于摄像头检测前方标记或者导航信息的自动驾驶汽车;1983年,在美国国防部先进研究项目局(DARPA)的支持下,卡内基·梅隆大学、斯坦福大学和麻省理工大学等相继开启了名为“陆地自动巡航(ALV)”的新计划,这个计划的研究目的就是让汽车拥有充分的自主权,通过摄像头来检测地形,通过计算机系统计算出导航和行驶路线等解决方案。
● 动态视觉计算(1994年)
德国慕尼黑联邦国防军大学的航空航天教授ErnstDick-manns于二十世纪七八十年代开创了一系列“动态视觉计算”的研究项目,并且在欧洲道路环境与安全(EUREKA)项目的资助下,成功研发了多辆自动驾驶汽车原型。1994年,该团队改装了一辆奔驰S500轿车,并为其配装了摄像头和其他多种传感器,用来实时监测道路周围的环境。
● 便携式计算设备(1995年)
1995年,美国卡内基·梅隆大学机器人研究所研究人员对一辆雪佛兰汽车进行了改装,在车身上加入了便携式计算机、挡风玻璃摄像头、GPS接收器等设备,成功研制了“NavLab1”。它的计算机系统由Marp、Sun3、Sun4三大部分组成,具有处理图像、理解图像、融合传感器信息、规划路径和控制本体等功能。Nav-Lab1的传感器主要包括彩色摄像机、陀螺、ERIM激光雷达、超声传感器、光电编码器和GPS等。这项研究成果对于现在的无人驾驶技术有着非常重要的借鉴意义。
● 多项技术爆发式出现(2004年-至今)
无人驾驶汽车的功能变得越来越复杂,它们开始学会处理其他车辆、交通信号、道路障碍等信息,以及如何与人类驾驶员和睦相处。2009年,谷歌公司在DARPA的支持下,开始了无人驾驶汽车项目的研发,许多2005-2007年间在DARPA从事研究的工程师都加入了谷歌的团队,他们相继成功地研发了视频系统、雷达和激光自动导航等技术。目前无人驾驶技术已经达到L3、L4级别。
(4)市场规模
2016年全球无人驾驶汽车市场规模为40亿美元左右,百度、谷歌、特斯拉等行业巨头都投身于无人驾驶汽车技术研究领域,预计到2021年全球市场规模将达到70.3亿美元左右。据调查,在国内88.1%的网民认为车祸是由于司机开车分心引起;85.4%的网民认为疲劳驾驶会导致车祸的发生。无人驾驶汽车的研发正是解决传统驾驶常见安全问题的有效变革,也是无人驾驶技术的主要价值体现。
传统汽车中,不同的汽车电子系统如中控系统、驾驶辅助系统、车联网系统需要独立的电子控制单元ECU,并主要通过CAN 总线相互连接和部署。想添加更多功能,就需要相应增加更多的 ECU。目前的汽车中大约包含20 到100 个ECU,随着车子电子化程度越来越高,尤其是自动驾驶、主动安全等功能的增加,汽车的 ECU 数量会急速增加。急速增加的ECU 会降低汽车的运算和数据交换效率,同时也将会大大增加车辆成本。采用数量更少的ECU 或者是一个运算能力超强的AD-ECU 作为汽车神经中枢成为发展的必然趋势,一个整合的驾驶舱电脑将会代替众多的ECU。
(5)市场的分类和构成
目前自动驾驶行业入局者众多,整体分为两派:一派走谷歌路线,搭载昂贵的高线束激光雷达、高性能芯片,直接实现L4级自动驾驶;另一派是整车厂和Tier1路线,从L2、L3到L4级自动驾驶渐进式发展。
1. 竞争分析
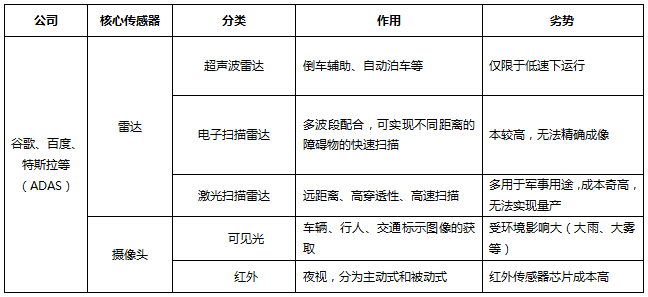
目前全世界范围内进行无人驾驶技术研究的玩家众多,其中不乏谷歌、百度、特斯拉等大型企业,目前均已达到L3或L4级别。
从技术层面分析,谷歌和百度等企业使用的ADAS技术较为先进,如下:
2.竞争优势
团队汽车行业出身,跟谷歌、百度等互联网企业相比,更了解被控系统及汽车车规,利于技术的落地。
作为核心技术的REM是自主研发,打破了以色列的垄断,大大降低了成本,提高了技术壁垒。
1.团队成员既了解被控系统及汽车车规,又了解非汽车行业的算法模式,对自动驾驶行业的研发及运营理解颇深。
2.不需要在整车上额外安装激光雷达、高精GPS等和装多显卡的大电脑,仅需加装公司所研发的ECU,利用车企高配车身上自带的现有传感器就可实现场景内的L3级自动驾驶功能,成本低廉。
3.已自主开发与激光具有同样的功能和定位精度的低成本REM技术,打破了以色列的技术垄断,提高了在国内市场竞争的技术壁垒。
4.已研发出可供量产的ECU产品,实现三种低成本落地场景。


